cos 495 - Autonomous Robot Navigation
Competition
Overview
On Wed. January 11th at 10:00am, we will conduct our Autonomous Navigation Competition. Robots will compete in matches that will qualify them for the championship competition. During each match, robots will navigate a maze to pass over preset landmarks. The most number of landmarks visited in the allowed time wins the match.
2012 COURSE DESCRIPTION!!!!!!!!!!!!!!!
The 2012 course consisted of the following task points which can be found here.
-code for Map.cpp
-code for Landmark.h
-You must also increase the maxNumMapSegments and maxNumLandmarks to 20 in Map.h
-ATTENTION! In the semi-final and final matches, Segment 15 will physically disappear after 2 minutes have passed! At this point, robots may score 4 points if they reach target T3 in the opponents territory, (note: no other points can be awarded from the other robot's territory). Robots running into other robots will lose 2 points for every collision. (i.e. if a robot is heading towards the other robot, it is penalized 2 points, if it is running away from the other robot, it will not be penalized for a collision).
The target locations are:
T0 (-1.5, -/+2.1) 1 point
T1 (-0.6, -/+2.1) 1 point
T2 (0.2, -/+2.0) 1 point
T3 (0.2, -/+1.15) 4 point
T4 (-0.4, -/+0.8) 1 point
T5 (1.2, -/+2.1) 1 point
T6 (1.5, -/+1.5) 2 points
T7 (-0.9, -/+0.9) 2 points
T8 (1.5, -/+0.3) 2 points
T9 (-1.5, -/+0.3) 5 points
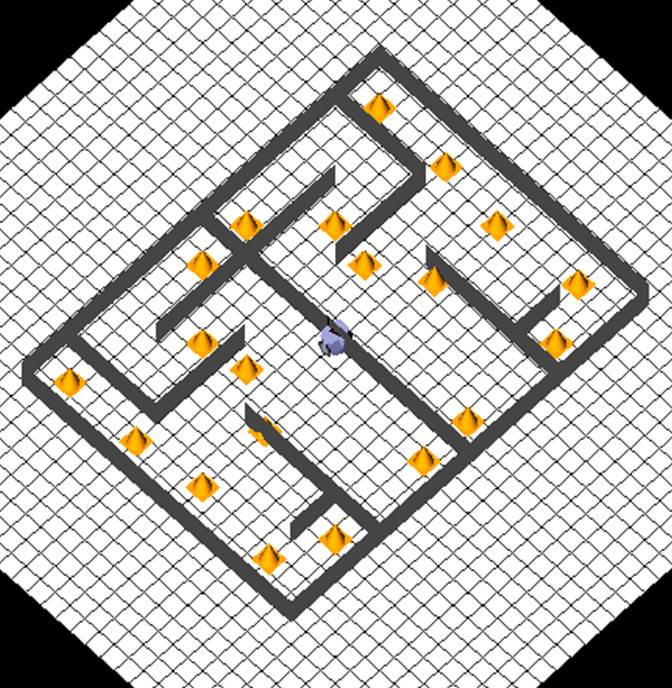
The course will be a mostly enclosed environment consisting of 1 foot high walls.
The robot must start each match at target T0 (-1.5, -/+2.1).
Rules
-
The 2012 course details will be released 24 hours before the competition.
-
Each match will last 3 minutes. Points will not be awarded or deducted after the 3 minute timer ends.
-
During each match, points will be awarded as follows:
-2.5 points gained for entering match and "trying" to visit task points.
-1 point gained for each target reached, plus any bonus points for specific targets.
-1 point deducted for collisions with a wall.
-0.25 points deducted for each button pressed on the GUI (except the first which has no deductions).
-
Targets are considered "reached" by the robot, if the robot drives over it such that the target lies within the footprint of the robot.
-
The robot may not be altered except to add non functioning payload of no more than 1 pound in weight. The payload must be able to be removed without damaging the robot. The payload must sit on top of the robot, and be placed within the plate attachment screws and X80 name plate.
-
You may use any algorithms you want. A*, odometry localization etc.
-
You will be disqualified for intentionally knocking down walls or interfering other robots.
-
Ties are broken in matches by determining who got points first.
Qualification play
In the beginning each team will have two matches. From these two matches, the 4 teams with the most points will qualify for the tournament.
Tournament play
The tournament will consist of 2 semi-final matches, followed by a bronze medal match, and finally a gold medal match. The losers from the 2 semi-final matches will compete in the bronze medal match. The winners from the 2 semi-final matches will compete in the gold medal match.
Judging
Judges will be conducted by the Instructor. No ruling may be contested.
Course Marks
The total marks is out of 10. For the qualifying round, you have potential to get a maximum of 9 marks. :
2 marks -for participating in each qualifying match
0.5 marks -for each point obtained in qualifying match
Example 1, if you get 3 points in match 1 and 3 points in match 2, then you get 7 marks total from the qualification round.
Example 2, if you get 3 points in match 1 and 7 points in match 2, then you get 8.5 marks total.
Example 3, if you get 2.5 points in match 1 and 2.5 points in match 2, then you get 6.5 marks total.
For the tournament round, where the top 4 teams will compete in 2 matches, you have potential to get an additional 2 marks. :
0.25 marks -for losing a match
0.75 marks -for winning a match