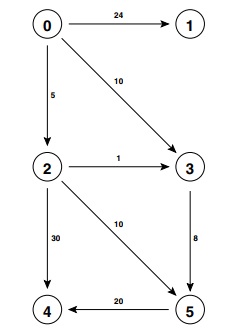
- Give all the distTo[] and edgeTo[] values that result.
- What is the maximum number of items in the priority queue?
- What is the last vertex popped from the priority queue?
- What letter is spelled out by the edges of the shortest-path tree (SPT) computed by Dijksta's algorithm?