0.0 |
 0.25 |
 0.5 |
 0.75 |
 1.0 |
void ImageAddNoise(Image *img, double factor);
Adds noise to an image. The amount of noise is given by the factor in the range [0.0..1.0]. 0.0 adds no noise. 1.0 adds a lot of noise.
0.0 |
0.25 |
0.5 |
0.75 |
1.0 |
void ImageBrighten(Image *img, double factor);
Changes the brightness of an image by interpolating between a black image (factor = 0.0) and the original image (factor = 1.0). Interpolation darkens the image, and extrapolation brightens it. See Graphica Obscura.
 0.0 |
 0.5 |
 1.0 |
 1.5 |
 2.0 |
void ImageChangeContrast(Image *img, double factor);
Changes the contrast of an image by interpolating between a constant gray image (factor = 0) with the average luminance and the original image (factor = 1). Interpolation reduces contrast, extrapolation boosts contrast, and negative factors generate inverted images. See Graphica Obscura.
 -0.5 |
 0.0 |
 0.5 |
 1.0 |
 1.7 |
void ImageChangeSaturation(Image *img, double factor);
Changes the saturation of an image by interpolating between a gray level version of the image (factor = 0) and the original image (factor = 1). Interpolation decreases saturation, extrapolation increases it, and negative factors preserve luminance but invert the hue of the input image. See Graphica Obscura.
 -1.0 |
 0.0 |
 0.5 |
 1.0 |
 2.5 |
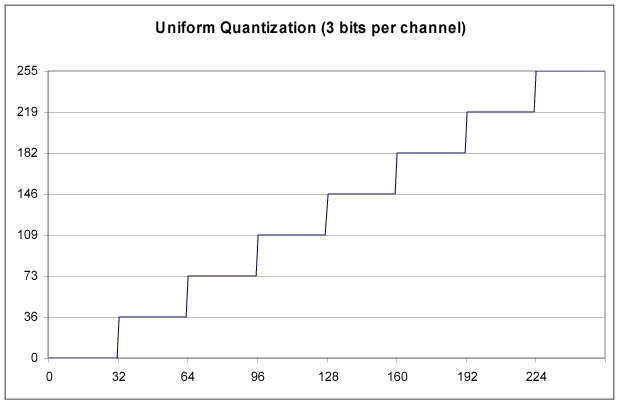
void ImageQuantize(Image *img, int nbits);
Converts an image to nbits bits per channel using uniform quantization.
The number of levels per channel is L = 2nbits.
The size of each input interval is a = 256 / L. The size of
each output output interval is b = 255.0 / (L - 1).
Each component c is mapped to floor(c / a) * b.
The graph below shows the resulting staircase function for the case nbits = 3
All the pixels within the same input interval are mapped to the same output level.
Notice the contours that appear when nbits is low.
 1 |
 2 |
 3 |
 4 |
 5 |
Other mappings exist, and will be accepted. Just make sure you explain the mapping you use.
void ImageRandomDither(Image *img, int nbits);
Converts an image to nbits bits per channel using random dithering. It is
similar to uniform quantization, but random noise is added to each component during
quantization. Using a and b as defined for quantization, each component c
is mapped to floor(c / a + noise()) * b. The
function noise() returns a random floating point number in the interval [-0.5,0.5].
 1 |
 2 |
 3 |
 4 |
 5 |
void ImageOrderedDither(Image *img, int nbits);
Converts an image to nbits bits per channel using ordered dithering. It is
similar to uniform quantization, but pseudo-random noise is added to each component before
quantization. The amount of noise added is determined by a Bayer's pattern matrix. The
following examples used the matrix
| Bayer4 | = | 15 | 7 | 13 | 5 |
| 3 | 11 | 1 | 9 | ||
| 12 | 4 | 14 | 6 | ||
| 0 | 8 | 2 | 10 |
For each pixel at (x,y), we compute i = x % 4, j = y % 4. Then, using a and b as defined for quantization, a component c is mapped to floor(c / a - 0.5 + Bayer4[i][j] / 15.0) * b.
 1 |
 2 |
 3 |
 4 |
 5 |
void ImageFloydSteinbergDither(Image *img, int nbits);
Converts an image to nbits per channel using Floyd-Steinberg dither with
error diffusion. Each pixel (x,y) is quantized, and the quantization
error is computed. Then the error is diffused to the neighboring pixels (x + 1, y),
(x - 1, y + 1), (x, y + 1),
and (x + 1, y + 1) , with weights 7/16, 3/16,
5/16, and 1/16, respectively.
 1 |
 2 |
 3 |
 4 |
 5 |
void ImageBlur(Image *img, int n);
Blurs an image by convolving it with a n x n Gaussian filter. In the examples below, the Gaussian function used was
and the value for sigma was chosen so that the weight at the center of the filter is 1.0, and the weight at a corner of the filter is 1 / (6 * r2 + 4 * r + 1), where r is n div 2.
 3 |
 7 |
 11 |
 15 |
 19 |
void ImageEdgeDetect(Image *img);
Detect edges in an image by convolving it with an edge detection kernel. In the example below, the kernel used was
-1 |
-1 |
-1 |
-1 |
8 |
-1 |
-1 |
-1 |
-1 |
Image *ImageScale(Image *img, double sx, double sy);
Scales an image in x by sx, and y by sy. The result depends on the current sampling method (point, bilinear, or Gaussian). In the example below, the size of the Gaussian filter is 3x3.
 Point |
 Bilinear |
 Gaussian |
If minifying, instead of magnifying, first blur the image, then point sample. The size of the blur filter is the inverse of the minification factor, rounded up to the closest odd number greater than or equal to 3.
Image *ImageRotate(Image *img, double angle);
Rotates an image by the given angle. The result depends on the current sampling method (point, bilinear, or Gaussian). In the example below, the size of the Gaussian filter is 3x3.
 Point |
 Bilinear |
 Gaussian |
void ImageComposite(Image *bottom, Image *top, Image *result);
Composites the bottom and top images into the result image.
Original Images
Brazilian soccer team ("seleçăo")
Me
Auxiliary Images
image -constantColor 373 512 0 0 0 > black.bmp image -constantColor 373 512 0 0 255 > blue.bmp
Final Image
image -composite black.bmp front.bmp front_mask.bmp < selecao.bmp > final.bmp
void ImageFun(Image *img);
Warps an image using a creative filter of your choice. In the following example, each pixel is mapped to its corresponding scaled polar coordinates. The artifacts of point sampling are very noticeable in this example.
 Original |
 Point |
 Bilinear |
 Gaussian |