|
|
What should my output format be? Your output must have one line per query pair. To make things easier on the grader, preceded each separated pair by NO, and each non-separated pair by YES.
NO: points (0.250, 0.800) and (0.600, 0.500) are not separable. YES: points (0.030, 0.030) and (0.010, 0.220) are separated by line (0.000, 0.120) and (0.230, 1.000)
What should I do if many lines separate a query pair? Output any one such line.
Do I need to use the search tree approach described in the assignment? No. However, if you use another method, be sure to provide a good justification in your readme.txt.
If one or two of the points lie on an input line, does that line separates the two points? We'll leave that decision up to you. If you use floating point numbers, you won't be able to make such a fine distinction. For example, with input5-99998yes.txt, our reference solution claims that the points (0.725, 0.644) and (0.461, 0.816) are separated by the line between (1.000, 0.200) and (0.300, 1.000), even though the point (461/1000, 816/1000) falls exactly on the line given by y = -8/7 x + 47/35. That's ok as long as you document the cause in your readme file.
Should I get exactly the same number of nodes as the reference solutions? Your answer should be in the same ballpark, but don't expect an exact match. The difference is due the way you introduce roundoff error in your floating point calculations, and how you deal with degeneracy.
Why do I need to compute the line segment intersections? It's not strictly necessary for correctness, but if you don't sub-divide the intervals, you will compute alot of false intersections and blow up the size of your tree. The following input should generate a tree with only 7 external nodes (one corresponding to each subdivision of the unit square). If you detect that lines 1 and 2 intersect in the clockwise subtree, you will end up with four nodes containing line 2 (instead of three).
What is meant by an external node? A null link. Each external node should correspond to one (and only one) subdivision of the unit square.
What is meant by the external path length? See Sedgewick Definition 5.6 on page 237.
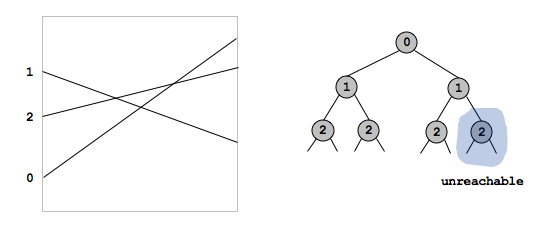
Should I compare every pair of line segments for an intersection when building the tree? No. You will need a separate node for each region, so it is possible that you will end up comparing roughly N^2 pairs of lines if there are that many intersections. However, your insertion algorithm should not take quadratic space unless there really are this many distinct regions. If you're not careful, you can end up with many nodes that represent regions of the plane and are unreachable via the ccw search.
How should I organize my program? The only requirement is that the main program is in a program named PointLocator. As always, use standard modular design principles. Our solution uses a data type Point for points in the plane, a data type LineSegment for directed line segments, and a search tree PointLocator for finding the region in which a query point lies.
|
|
Input and output. Here are a number of sample input files. We also encourage you to create your own (possibly pathological) inputs to help test your program. We'll consider awarding extra credit if you submit inputs that cause other programs (or ours!) problems. The input should be very small, and it should expose a potential flaw that other programs are likely to face. We'll post these input files for other students to use.
Reference solutions. For reference, we provide executable code for our solution in Windows, Solaris, and OS X. Because of floating point and degenerate cases (and varying ways to deal with them), we cannot guarantee that our solutions are always accurate. If you discover any potential bugs, please let us know.
Timing. Unix users may find the shell script timeit.csh useful for computing a table of CPU times.
|
|
You are free to organize your program as you see fit. As usual, we encourage and reward sound design principles. At the very least, you should probably have data types for points and line segments. Also, you should have a data type in which you can insert line segments and query for separations between point pairs.
Here is a template readme.txt file. It should contain the following information:
|
|
|
|
What's the most regions that can be created with N intersecting lines in the plane? (N^2 + N + 2) / 2. This is the famous pancake cutting problem.
Can you get logarithmic query times in the worst case? Yes. This was first discovered at Princeton by Dobkin and Lipton. They designed an algorithm that achieves O(log N) query time with O(N^2) space and preprocessing time. They also showed that if binary decisions are used to locate the query points, then you can't do better than log N time per query.
Quadratic space seems excessive. Can you do better? Yes, there are several more complicated algorithms that achieve the logarithmic query time in only linear space. The first such method was discovered at Princeton by Lipton and Tarjan. Chazelle (another Princeton professor) created something called a "hive graph" that also solves the problem in this bound. A simpler algorithm using persistent search trees discovered by Sarnak and Tarjan is the focus of a COS 423 lecture. The preprocessing step uses O(N) space and O(N log N) time; queries take O(log N) time.